La mobilité du GR100 repose sur une fusion de données de haut niveau (LiDAR 3D, caméras, GPS, IMU) couplée au SLAM et à des unités de calcul dédiées pour se localiser finement et naviguer en temps réel. Les algorithmes de planification traduisent ces estimations en trajectoires sûres, tandis que les filtres d’estimation limitent le bruit et compensent les pertes de signal. Cette architecture tolérante aux pertes GPS maintient la précision des patrouilles et l’évitement d’obstacles dans des environnements complexes. Résultat : un déplacement autonome robuste, prédictif et exploitable opérationnellement, qui élève le niveau technologique de la surveillance mobile du robot GR100.
Dans l’écosystème complexe de la robotique mobile autonome, technologie et fusion de données jouent un rôle crucial dans la manière dont nos robots de sécurité autonomes se déplacent et se repèrent dans leur environnement. Nous explorerons, ici, les technologies de cartographie, de navigation et de localisation qui permettent à nos robots rondiers de se déplacer avec agilité et précision.
La fusion de données, ou data blending, consiste à combiner des informations de différentes sources afin de créer un jeu de données analytique exploitable pour la prise de décisions métier ou pour un processus métier spécifique.
En ce qui concerne nos robots de surveillance extérieurs, il s’agit de la fusion de données de capteurs multimodaux. En combinant des capteurs visuels, LIDAR, ultrasons et autres, les robots sont alors capables de compenser les limites de chaque technologie individuelle.
La première pierre angulaire de la mobilité autonome réside dans la cartographie robotique. Nos robots de sécurité autonomes exploitent une technologie complexe qui leur permet de créer une carte de leur environnement tout en se localisant par rapport à cette carte. Il s’agit de la technologie SLAM, ou Simultaneous Localization and Mapping.
Cette technologie vient fusionner les données des capteurs :
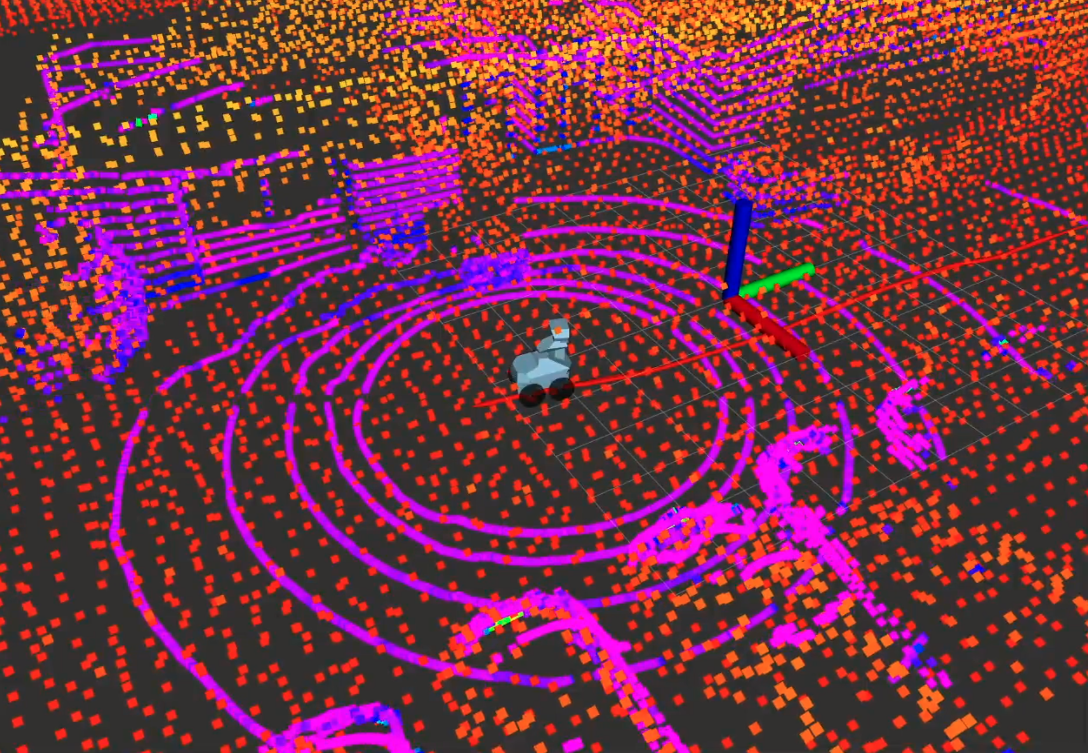
Dans le cas de notre robot GR100, les capteurs LIDAR haute définition, associés à des algorithmes de traitement de nuages de points, permettent une perception tridimensionnelle de l’environnement. Cette cartographie en temps réel, basée sur des techniques de fusion de données multi-capteurs, fournie une représentation spatiale tridimensionnelle précise, pour une navigation avancée.
La localisation précise est le saint Graal de la robotique autonome. Tout comme pour la cartographie, il est ici question de fusionner les données de différents capteurs pour que les robots se situent avec précision : GPS, capteurs inertiels, une carte géo-référencée, l’odométrie, LIDAR et caméras.
Les données de localisation sont traitées grâce à un filtrage de Kalman étendu. Cet algorithme de fusion de données avancé minimise les erreurs en estimant de manière optimale l’état du système à partir de données bruitées.
La localisation du GR100 est le résultat de la convergence d’un récepteur GPS de haute précision, couplé à des capteurs inertiels sophistiqués qui alimentent un algorithme de fusion de données. Cette approche novatrice permet au robot de s’auto-localiser avec une marge d’erreur minimale. Les données issues de capteurs multi-sources lui garantissent un positionnement précis, ainsi qu’une tolérance aux pertes GPS.
La navigation des robots autonomes repose sur une combinaison astucieuse de données sensorielles et d’algorithmes sophistiqués. Les systèmes de navigation intelligents intègrent plusieurs couches d’informations pour prendre des décisions éclairées.
Les éléments clés comprennent :
La navigation autonome du GR100 repose sur des algorithmes de planification de trajectoire avancés et des unités de traitement dédiées. Des capteurs de mouvement IMU de haute précision, intégrés à des systèmes de perception visuelle, alimentent un modèle de navigation prédictif. La fusion de données provenant de ces multiples sources permet au robot de prendre des décisions dynamiques, optimisant sa trajectoire en fonction des obstacles détectés et des paramètres environnementaux en constante évolution.
La fusion de données est le cœur névralgique qui alimente l’intelligence de nos robots autonomes. Cette approche nous permet de combiner des données hétérogènes pour obtenir une vision complète de l’environnement.
Alors que la technologie et la fusion de données continuent de progresser, le futur de la robotique mobile autonome promet des avancées encore plus révolutionnaires, ouvrant de nouvelles perspectives pour la sécurisation des espaces privés, industriels et risqués.
Chez Running Brains Robotics, la cartographie évoluée, la localisation précise et la navigation intelligente, soutenues par l’expertise de nos ingénieurs, créent une solution de sécurité proactive et rentable pour nos clients.
La promesse ? Faire évoluer les technologies implantées dans nos robots pour garantir une fiabilité continue et poser les bases d’une nouvelle ère dans le domaine de la sécurité et sûreté privée. Ensemble, anticipons les défis de demain avec précision et réactivité !

CMO chez Running Brains Robotics